INFORMACIÓN SOBRE LA PLATAFORMA Y EL SENSOR (GeM+)
En esta sección se informa de las variables relacionadas con la captura de la imagen a documentar y se divide en estas subsecciones:
- Misión: información sobre la plataforma y el sensor
- Imagen: datos sobre el tipo de escena y la órbita y pasada de la imagen
- Posición y Actitud: posición y actitud del sensor en el momento de tomar la imagen (coordenadas y sistema de referencia)
- Focal y Punto Principal: distancia focal de la cámara y punto principal de la imagen (coordenadas y sistema de referencia)
En esta subsección se informa de la plataforma y del sensor desde los cuales ha sido captada la imagen a documentar.
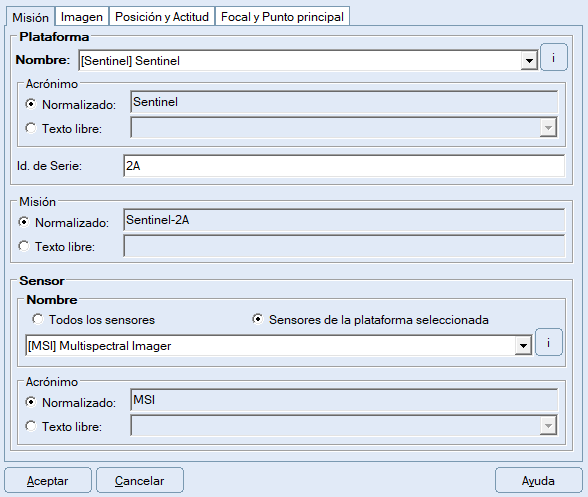
Plataforma
En la parte de Plataforma se puede escoger el nombre de la plataforma a partir de una lista de algunas de las más conocidas. En caso de que no aparezca la deseada, se puede escribir en Texto libre.
También se permite indicar el identificador de serie que especifica el miembro de la serie de plataformas (serie de diferentes satélites Landsat, por ejemplo) del cual provienen los datos. Acostumbra a ser un número (7 para Landsat-7) o letras de serie.
Misión
En la parte de Misión se indicará el nombre normalizado por defecto, que será el nombre de la plataforma concatenado con el identificador de la serie con un guion entre ellos. En caso de querer asignar otro nombre de misión, se puede indicar en la parte de Texto libre.
En la parte de Sensor se puede escoger el nombre del sensor de la plataforma a partir de una lista dependiente de la plataforma escogida. También se permite escribir cualquier cadena que se desee.
En el acrónimo se indicará su acrónimo normalizado, que también sirve para identificarlo. Muchos sensores se citan más por su acrónimo que por el nombre completo, por ejemplo: ETM+ en lugar de Enhanced Thematic Mapper Plus. En caso de querer asignar otro acrónimo, se puede indicar en la parte de Texto libre.
En esta subsección se indica el tipo de escena y la órbita y la pasada de la imagen.
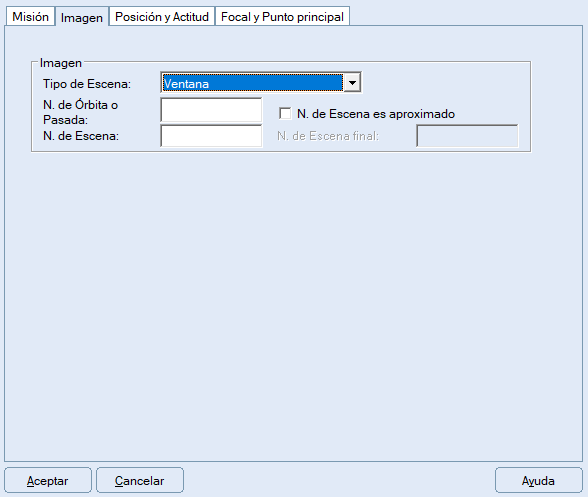
Se puede indicar el tipo de escena que almacenan los datos documentados. Los diferentes tipos de escenas existentes son:
- Escena desconocida
- Escena completa: la imagen ocupa todo el frame correspondiente a la pasada y escena de captación. Es también la adecuada para un fotograma de fotografía aérea escaneada en su totalidad.
- Escena completa flotante: la imagen ocupa el mismo espacio que un frame pero se encuentra solapando dos escenas completas de la misma pasada.
- Cuadrante estándar 1: la imagen ocupa el cuadrante noroeste de la escena completa.
- Cuadrante estándar 2: la imagen ocupa el cuadrante noreste de la escena completa.
- Cuadrante estándar 3: la imagen ocupa el cuadrante suroeste de la escena completa.
- Cuadrante estándar 4: la imagen ocupa el cuadrante sureste de la escena completa.
- Cuadrante flotante: la imagen ocupa el mismo espacio que un cuadrante pero se encuentra en una posición solapada entre dos o más cuadrantes.
- Microescena: la imagen ocupa un tamaño reducido menor al de un cuadrante.
- Escenas consecutivas: la imagen ocupa más de una escena consecutiva.
- Ventana: la imagen ocupa una zona de ventana variable dentro del frame.
El número de órbita o pasada indica a cuál de las órbitas del satélite o de las pasadas del avión corresponde la imagen considerada.
El número de escena indica a cuál de las escenas (dentro de la órbita o pasada del avión documentada en PathNumber) corresponde la imagen considerada. En caso de escenas consecutivas se debe introducir el número de escena inicial.
En caso de escenas consecutivas, es necesario indicar el número de escena inicial (en la entrada Número de escena) y el número de escena final (en esta entrada) de la imagen considerada.
En algunos casos el número de escena es aproximado ya que la imagen está solapada o ocupa dos o más imágenes. Esta entrada está relacionada con la entrada Tipo de Escena, de forma que:
- Escena completa, Cuadrante estándar 1, Cuadrante estándar 2, Cuadrante estándar 3 y Cuadrante estándar 4: no es posible activar esta opción.
- Escena completa flotante: el número de órbita o pasada es siempre aproximado, por lo tanto, esta opción está activada y no se puede desactivar.
- Escena desconocida, Cuadrante flotante, Microescena, Escenas consecutivas y Ventana: es posible definir si el número de órbita o pasada es aproximado o no.
Posición y actitud del centro óptico
En esta subsección se indica la posición y la actitud del sensor en el momento de tomar la imagen (coordenadas y sistema de referencia).
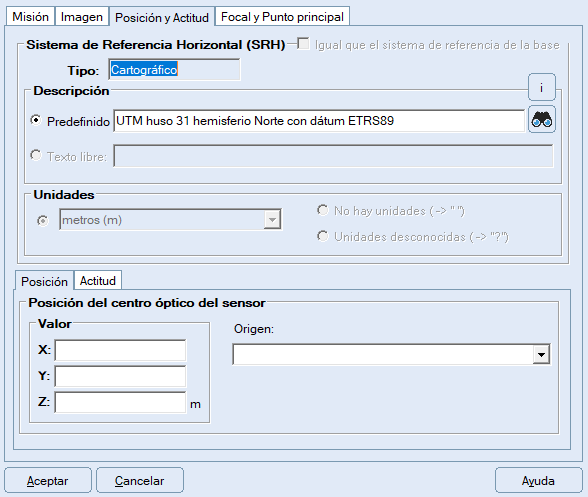
Sistema de referencia horizontal (SRH) de la posición del sensor
Se puede escoger el sistema de referencia para referenciar la posición y la actitud del centro óptico del sensor. Siempre debe ser de tipo cartográfico y si el sistema de referencia horizontal de la base también es de tipo cartográfico, se puede definir que este SRH sea el mismo que el de la base.
Si se marca esta opción, todos los datos del SRH usado para definir la posición del centro óptico del sensor quedarán rellenados con la información del sistema de referencia de la base y no se podrán modificar. En caso de que se modifique el SRH de la base, el SRH de la posición del centro óptico del sensor continuará siendo el mismo que antes pero el botón de "Igual que el sistema de referencia de la base" quedará desmarcado.
En caso de querer definir un SRH diferente al de la base, se puede seleccionar un sistema de referencia predefinido con el botón ![]() donde
se abrirá una nueva ventana que permite seleccionar un sistema de referencia horizontal usado recientemente, definido en el fichero de parámetros de configuración, de las tablas geodésicas o bien copiarlo de un fichero existente.
Para más información, véase aquí.
donde
se abrirá una nueva ventana que permite seleccionar un sistema de referencia horizontal usado recientemente, definido en el fichero de parámetros de configuración, de las tablas geodésicas o bien copiarlo de un fichero existente.
Para más información, véase aquí.
También se puede ver la información de los parámetros del SRH seleccionado con el botón ![]() donde aparece una nueva ventana que muestra información
de los diferentes parámetros de su proyección, su datum, su elipsoide, etc.
donde aparece una nueva ventana que muestra información
de los diferentes parámetros de su proyección, su datum, su elipsoide, etc.
En las unidades se muestran las unidades del sistema de referencia horizontal escogido, que pueden ser valores de longitud y latitud (en un sistema de referencia geográfico) o para medir distancias (en un sistema de referencia planar). Más información sobre el elemento Unidades del sistema de referencia en la información sobre el sistema de referencia horizontal de la base.
Posición del sensor
Se indica la posición del centro óptico del sensor en el momento de tomar la imagen, relativa a un sistema de referencia cartográfico. Para definir la posición es necesario determinar el valor de las tres coordenadas X, Y y Z que estarán referidas al sistema de referencia horizontal indicado. También es posible definir cuál es el origen de estos datos, con los siguientes valores:
- GPS: Sistema de posicionamiento global
- Efemérides
- Estimación a partir de Puntos de Control
Alternativamente, el usuario puede escribir cualquier otro valor necesario.
Actitud del sensor
Se indica la actitud (en grados) del centro óptico del sensor en el momento de tomar la imagen. Para definir la posición es necesario determinar el valor de los tres ángulos: Deriva (yaw), Cabeceo (pitch) y Alabeo (roll). También es posible definir cuál es el origen de estos datos, con los siguientes valores:
- INS: Sistema inercial de navegación
- Efemérides
- Estimación a partir de Puntos de Control
Alternativamente, el usuario puede escribir cualquier otro valor necesario.
En esta subsección se informa de la distancia focal de la cámara y el punto principal de la imagen (coordenadas y sistema de referencia).
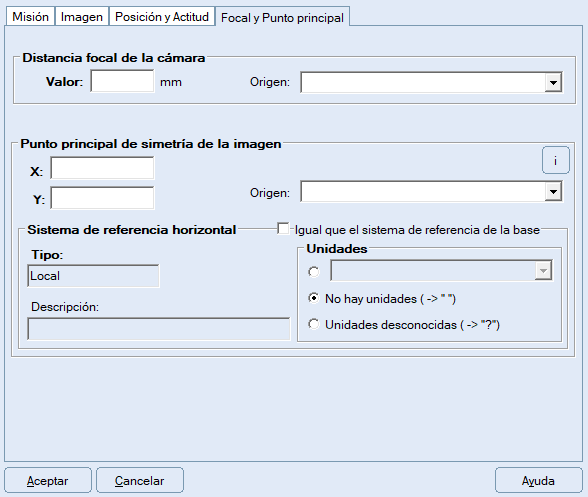
Distancia focal de la cámara
Es la distancia, en milímetros, entre el centro de la proyección y el plano de la imagen del sistema óptico usado para captar un fotograma a través de una cámara métrica, típicamente medida en el laboratorio antes del vuelo o del lanzamiento. Valores típicos son entre 15 y 35 mm para cámaras digitales y entre 50 y 250 mm para cámaras analógicas. También es posible definir cuál es el origen de estos datos, con los siguientes valores:
- Calibración en laboratorio
- Estimación a partir de Puntos de Control
- Metadatos del fichero original
Alternativamente, el usuario puede escribir cualquier otro valor necesario.
Punto principal de simetría de la imagen
Es la posición del centro de círculos de igual distorsión de las lentes, relativa al sistema de referencia local de la imagen. Para definir la posición es necesario determinar el valor de las coordenadas X e Y así como el sistema de referencia (siempre debe ser local). También es posible definir cuál es el origen de estos datos, con los siguientes valores:
- Calibración en laboratorio
- Estimación a partir de Puntos de Control
Alternativamente, el usuario puede escribir cualquier otro valor necesario.
El sistema de referencia horizontal (SRH) para referenciar la posición del punto principal de simetría de la imagen siempre debe ser de tipo local. Si el sistema de referencia horizontal de la base también es de tipo local, es posible definir que el sistema de referencia utilizado para definir la posición del punto principal de simetría de la imagen sea el mismo que el sistema de referencia horizontal de la base.
Si se marca esta opción, todos los datos de este SRH quedarán rellenados con la información del sistema de referencia de la base y no se podrán modificar. En caso de que se modifique el sistema de referencia de la base, entonces el sistema de referencia de la posición del punto principal de simetría de la imagen continuará siendo el mismo que antes pero el botón de "Igual que el sistema de referencia de la base" quedará desmarcado.
En las unidades se muestran las unidades del sistema de referencia horizontal escogido, que pueden ser valores de longitud y latitud (en un sistema de referencia geográfico) o para medir distancias (en un sistema de referencia planar). Más información sobre el elemento Unidades del sistema de referencia en la información sobre el sistema de referencia horizontal de la base.
![]()
(volver al índice)